自动驾驶系统设计中的LIDAR:用于目标分类?还是目标检测?
品慧电子讯全自动驾驶的未来已不再遥不可及。如今,与自动驾驶相关的问题主要围绕让自动驾驶成为现实所需的底层技术和技术进步来展开。在支持向自动驾驶应用过渡方面,激光探测和测距(LIDAR)技术是讨论最多的技术之一,但仍存在诸多问题。测距范围大于100米,角分辨率达到0.1°的LIDAR系统仍然是自动驾驶领域里的核心模块。但是,并非所有自动驾驶应用都需要这种级别的性能。泊车助手和街道清扫就是其中两个。
目前有大量景深测量技术可以实现这些应用,例如无线电探测和测距(雷达)、立体视觉、超声波探测和测距,以及LIDAR。但是,这些传感器都是在性能尺寸成本之间做了妥协。超声波器件最为经济高效,但其范围、分辨率和可靠性都很有限。雷达的检测范围和可靠性得到大幅提升,但它的角分辨率存在限制;此外,立体视觉的计算成本非常高,而且如果不能妥善校准,则精度非常有限。精心设计的lider系统能做到在长探测距离下,精准的测距,出色的角分辨率,较低的算法处理,所以能够帮助弥补这些不足。但是,LIDAR系统一般体积大,成本高,这些缺点需要改进。
LIDAR系统设计要确定系统对小目标的探测能力,在多少远处能探测到多低反射率的多小尺寸的目标。同时这也就定义了系统需要的角分辨率。由此可以计算得出可达到的最小信噪比(SNR),该最小信噪比就决定了系统探测的检测概率与误检概率。
了解感知环境和必要的信息量,作出适当的设计权衡,从而开发出成本和性能最佳的解决方案。例如,一辆自动驾驶汽车以100 kph (~27 mph)的速度在道路上行驶,而自动机器人则以6 kph的速度在步行区或仓库中移动。在高速情况下,我们可能不但需要考虑以100 kph的速度行驶的车辆,还需要考虑以相同速度对向行驶的另一车辆。对于感测系统来说,这相当于一个物体以200 kph的相对速度接近。对于LIDAR传感器来说,检测对象之间的最大距离为200 m时,两车之间的距离在一秒内便会缩短25%。应该注意的是,在进行规避时,汽车的速度(或与对象之间的非直线逼近速度)、刹停距离和动力学这些复杂因素会因具体情况而异。一般来说,高速应用需要采用检测距离更长的LIDAR系统。
分辨率是LIDAR系统设计中的另一个重要系统特性。精细的角度分辨率使LIDAR系统能够从某一个被测目标接收到多个像素的回波信号。如图1所示,在200m处,1°角分辨意味着单个像素宽度为3.5m。这种像素尺寸比许多目标的物理尺寸都大,这会带来多重挑战。首先,我们通常使用空间平均法来改善SNR和检测能力,但是如果目标只占据一个像素点,这种方法并不适用。此外,即使能检测到,我们也无法评估出目标的尺寸。道路上的垃圾碎屑、动物、交通标志和摩托车,这些物体的尺寸通常都小于3.5米。当角分辨率再提升10倍达到0.1°,对于200米开外的汽车,水平方向就能采集到5个相邻的像素点。这意味着在200m开外,就能区分出是汽车还是摩托车。(看交通工具的宽度即可,一般情况下交通工具都是宽度大于高度的。且汽车和摩托车高度差不多,宽度有明显区别)。
为能安全的自动行驶,不仅方位角需要高分辨率,有时候还需要俯仰角高分辨率。想象一下,自动化的扫地机器人尽管移动缓慢但是需要检测细高的物体,如桌子腿,以便判断能否钻进桌下进行工作。这个需求与之前的高速自动驾驶需求就不太一样了。
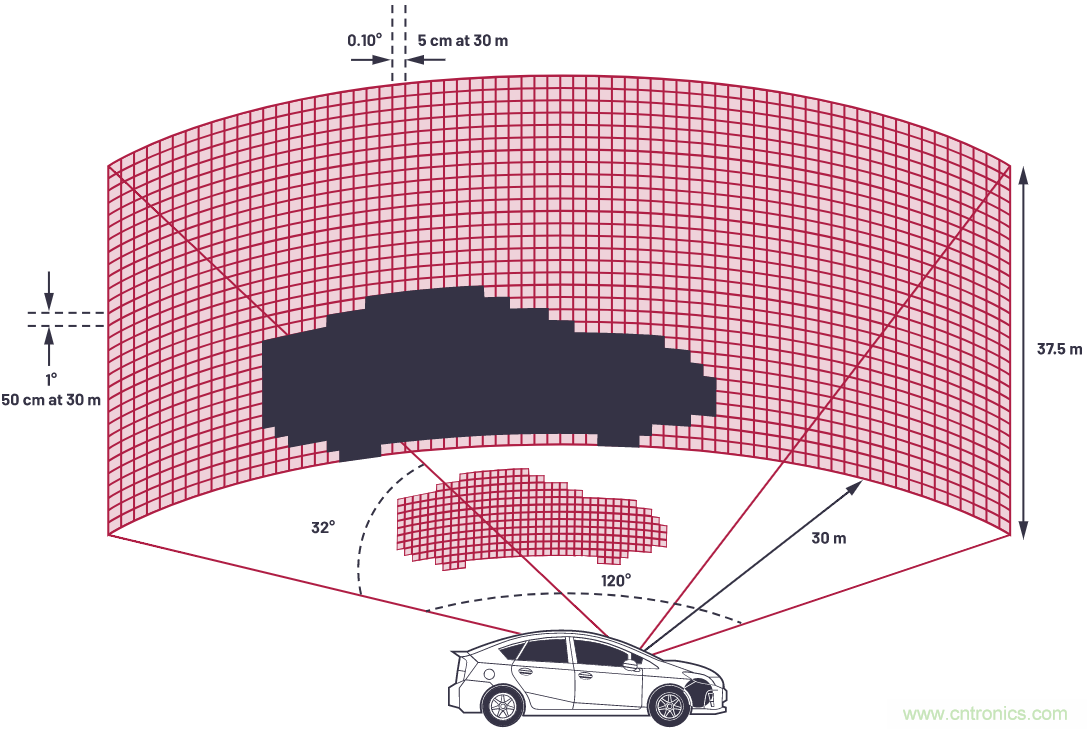
图1. 1°水平分辨率的32线扫描LIDAR系统
一旦确定下来自动驾驶设备的速度与行驶场景,需要探测目标的性质以及要达到的性能,就可以构建符合其应用的LIDAR系统构架。您可以做出多种选择,例如扫描与闪光、直接飞行时间(ToF)与波形数字化,但本文暂不讨论它们各自的优缺点。无论选择哪一种架构,ADI丰富的高性能信号链和电源管理组件产品系列(用蓝色突出显示,参见图2)会提供所需的构建块,帮助设计存在不同限制(例如尺寸和成本)的系统。
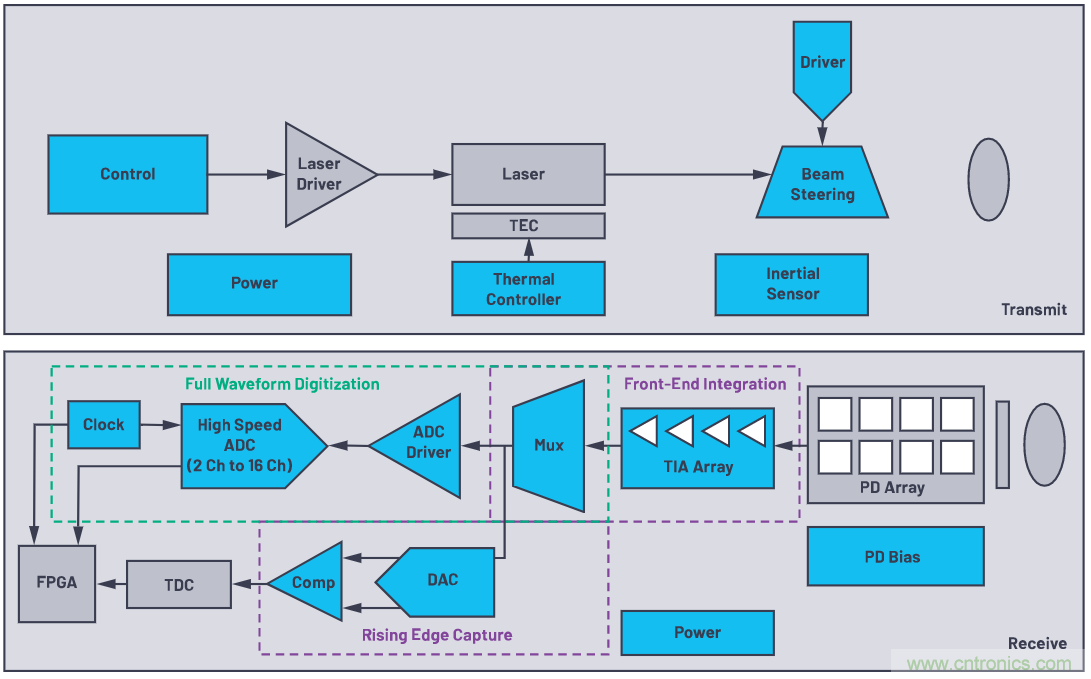
图2 使用分立元件的LIDAR系统
AD-FMCLIDAR1-EBZ 是 高性能的LIDAR原型制作平台,也是905 nm脉冲直接ToF LIDAR开发套件。使用这个系统可以快速构建机器人、无人机、农业和建筑设备,以及采用1D静态闪光配置的ADAS/AV的原型。这个参考设计中选用的组件主要是针对长距离脉冲LIDAR应用。该系统采用905 nm激光源,由高速、双通道4 A MOSFET ADP3634驱动。它还包括由可编程电源 LT8331供电(用于生成APD电源电压)的First Sensor 公司的16通道APD阵列。包括多个低噪声、高带宽的4通道 LTC6561 TIA,一个AD9094 AD9094 1 GSPS、8位ADC,其在通道上的功耗最低,为每通道435 mW。 我们的设计需要继续增大带宽和采样速率,以帮助提高整个系统的帧率和范围精度。与此同时,需要最大限度降低功耗。这是因为散热减少可以简化热/机械设计,从而帮助模块减小外形尺寸。
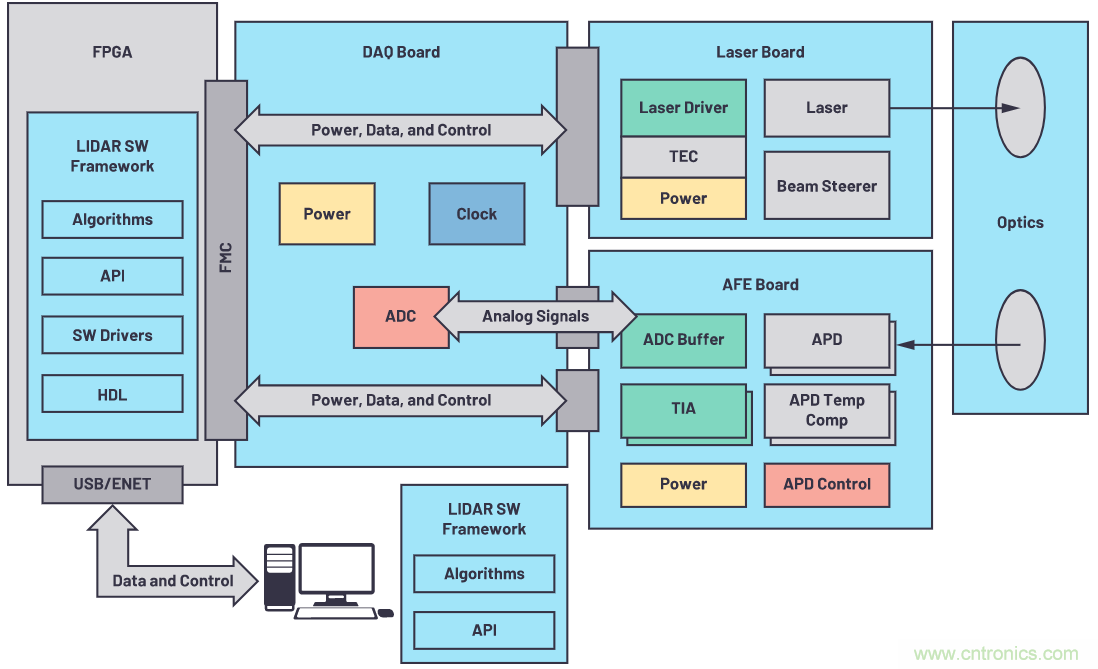
图3.ADI公司的AD-FMCLIDAR1-EBZ LIDAR开发解决方案系统架构。
测量距离(或深度)、精度都与ADC采样速率相关。距离测量精度使得系统能够准确获知与目标之间的距离,对于需要近距离移动的场景(例如停车或仓储物流),这非常重要。此外,可以根据多帧之间目标距离的变化来计算目标的速度,这种情况下就要求对目标距离的测量精度要很高。采用简单的阈值算法(例如直接ToF)时,1 ns采样时段(也就是,使用1 GSPS ADC)的范围精度可达到15 cm。计算公式为c(dt/2),其中c表示光速,dt表示ADC采样时段。鉴于包含ADC,所以,可以采用更复杂的技术(例如插值)来改善范围测量精度。据估计,测量精度将正比于信噪比的均方根。匹配滤波器是用于处理数据的性能最高的算法之一,它可以在插值之后最大化SNR,从而得到最好的距离测量精度。
EVAL-ADAL6110-16,一款高度可配置的评估系统,可以辅助实施LIDAR系统设计。它为需要实时(65 Hz)检测/跟踪对象的应用(例如防撞、高度监测和软着陆)提供简单但可配置的2D闪存LIDAR深度传感器。
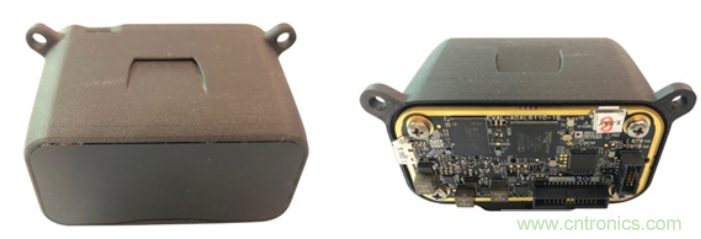
图4.使用集成式16通道ADAL6110-16的EVAL-ADAL6110-16 LIDAR评估模块。
参考设计中使用的光学器件为我们提供了37°(方位角)和5.7°(俯仰角)的视野(FOV)。在方向角的16像素线性矩阵中,20米像素大小相当于普通成人的体型,为0.8米(方位角)×2米(俯仰角)。如前所述,不同的应用可能需要不同的光学配置。如果现有的光学器件不能满足应用需求,可以轻松从壳体上取下印刷电路板,并将其集成到新的光学配置中。
该评估系统以ADI的 ADAL6110-16为核心,这是一款低功率、16通道的集成式LIDAR信号处理器(LSP)。该器件为相关的照明区域提供时序控制和对接收的波形采样的时序,且能对获取的波形实施数字化。ADAL6110-16集成了高灵敏度的模拟元件,可以帮助降低本底噪声,使系统能够捕获能量很低的回波信号。相对于采用类似信号链的分立式元件方案,它们的本底噪声是由rms噪声决定的,所以其灵敏度不如ADAL6110的方案。此外,使用集成信号链可以减小LIDAR系统设计的尺寸大小、重量和功耗。
系统软件能让芯片快速测距以便完成多点测量。它的通道之间是完全独立的,通过USB提供的单个5 V电源运行,通过使用该模块的机器人OS(ROS)的驱动,可以很方便集成进现有的自动驾驶系统。用户只需创建一个连接器,将设备与机器人或者车辆的接口相连,即可通过以下四种通信协议进行通信:SPI、USB、CAN或RS-232。可以选择不同的接收器和发射器技术对参考设计实施修改。有关EVAL-ADAL6110-16和ADAL6110-16 LSP的更多信息,请访问analog.com/LIDAR.
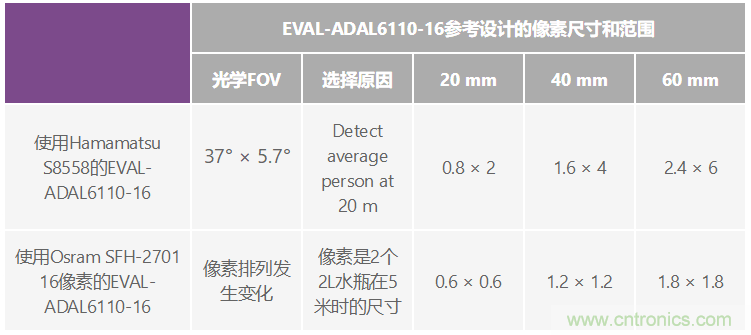
如前所述,可以更改EVAL-ADAL6110-16参考设计的接收器技术,以构建图5至图7所示的不同配置。EVAL-ADAL6110-16采用Hamamatsu S8558 16元件光电二极管矩阵。表1中显示的不同距离下的像素大小是基于有效像素大小,即0.8 mm×2 mm,以及20 mm的焦距镜头。例如,如果使用单个光电二极管(例如Osram SFH-2701)来重新设计这个板,且每个光电二极管的有效面积为0.6 mm × 0.6 mm,那么相同范围内的像素大小会大为不同,因为FOV会随像素大小而改变。
表1.EVAL-ADAL6110-16中使用的接收器大小和光学器件,以及将接收器更换为SFH-2701之后,可能的像素排列
例如,我们来回顾一下16个像素配成一行的S8558,各像素尺寸为:2 mm × 0.8 mm。
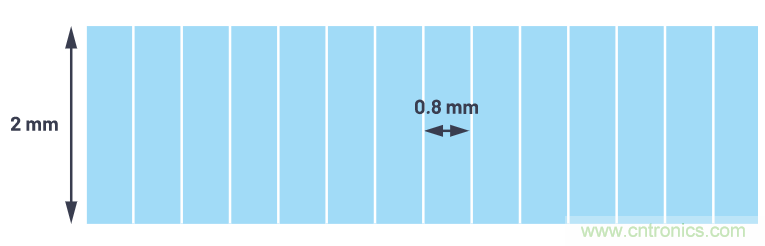
图5.Hamamatsu S8558 PIN光电二极管阵列的尺寸。
选择20mm焦距镜头后,可以利用基本三角函数计算出每个像素的垂直和水平FOV,如图6所示。当然,选择镜头时还需要考虑其他更复杂的因素,比如像差校正和场曲效应。但是,对于这样的低分辨率系统,一般只需要进行简单的光路计算。
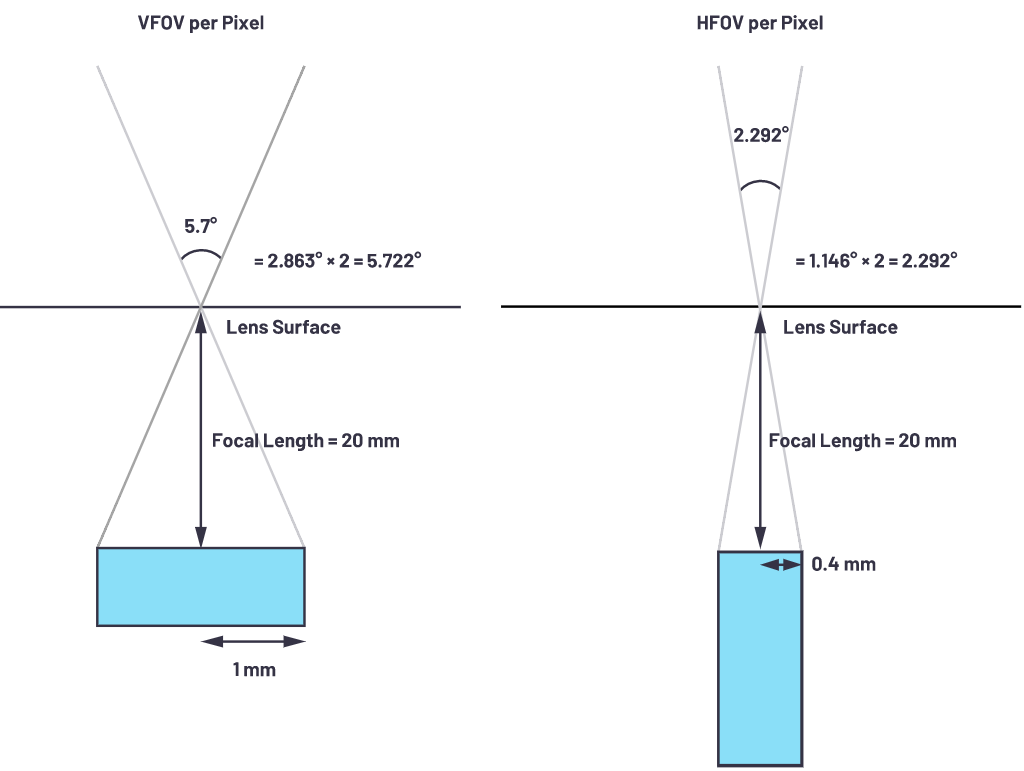

图6. 简单光学模型的角分辨率基本计算
所选的1×16像素FOV可用于自动驾驶车辆和自动地面车辆的对象检测和防撞等应用中,或者使受限环境(例如仓库)中的机器人实现同步定位与地图绘制(SLAM)。
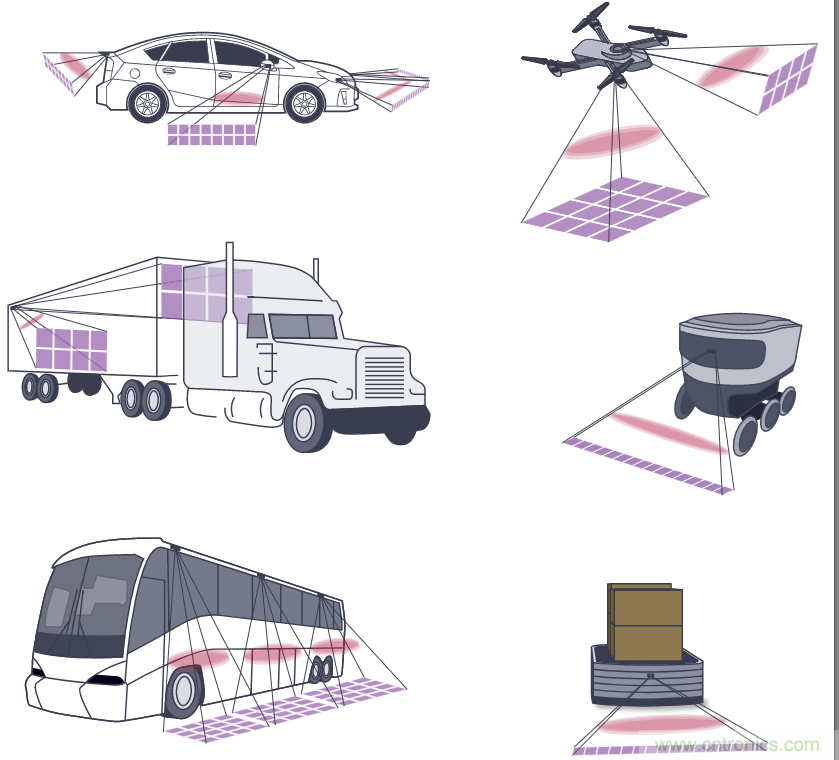
图7.LIDAR系统的各种光学配置,可以帮助增强应用的安全性。
有一种独特应用,需要配置4 × 4网格矩阵,以检测系统周围的物体。这个正在开发中的应用将被安装在大客车和RV(休闲车辆)中,作为车辆的安全器件,可以在车辆近旁有行人行走时向驾驶员发出警报。该系统可以检测行人行走的方向,提醒驾驶员刹停车辆或按喇叭提醒行人,以防撞倒行人或自行车骑行者。
注意,并非每种应用都需要0.1°的角分辨率和100米测量范围。细想一下应用真正需要采用哪种LIDAR系统设计,然后明确定义关键标准,例如对象大小、反射率、与对象的距离,以及自动驾驶系统行进的速度。
这可以为组件选择提供依据,使系统设计在出色性能、成本和需要的功能之间达成平衡,以便大幅提高首次设计成功的可能性。
推荐阅读:
隔离式栅极驱动器的峰值电流
低压电池监控器进入高压电动汽车
新冠肺炎疫情是否会加速电气化革命?
Digi-Key全球分销Mag Layers USA的MMD系列模制功率电感器
实现具有更高击穿电压和更低待机电流的离线辅助PSU电源装置