残余相位噪声测量法
品慧电子讯残余相位噪声测量法消除了外部噪声源(例如电源或输入时钟)的影响,而绝对相位噪声测量法包含了这些来源的噪声。残余相位噪声装置可以隔离并测量器件的相加相位噪声。利用此信息,设计师可在信号链中选择各个器件,以满足整个系统的相位噪声要求。本文包含了定时器件的相位噪声图,以突出残余相位噪声装置的属性。此外,它还说明了如何使用相加相位噪声来识别信号链中的噪声问题来源。
图 1 显示了用于测量待测器件 (DUT) 的相加相位噪声的装置。请注意,使用了两个 DUT;每个 DUT 均连接到公用电源和输入时钟。这些公用噪声源产生的相位噪声在每个 DUT 输出处相关联。通过简单地将相位检测器建模成为一个具有与增益 KPD 的模拟乘法器,可以得出输出相位噪声:
其中 E1 是经过放大的 DUT1 输出信号,E2 是经过放大和延迟的 DUT2 输出信号,EC1 和 EC2 是信号功率,θM1 和 θM2 是相位噪声的幅值,ωC 是载波频率,ωM 是偏置频率。应用叠加,因此当考虑来自外部源的相位噪声时,DUT 固有的相位噪声可以忽略不计。如果 DUT1 和 DUT2 具有相同的超量相位传递功能,则由时钟源和电源产生的 θM1 部分等于由公用时钟源和电源产生的 θM2 部分。这种现象称为电源牵引,可以简单地通过以下方程式描述:
这样,相位调制的幅度可由电源上的电压噪声与 KP 的乘积 - 电源牵引增益(弧度/V)得出。如果 DUT1 和 DUT2 具有等效的电源牵引增益,则理论上可以取消相位检测器输出处的这些噪声源,从而只留下两个 DUT 的无关噪声以进行测量。
内在的 DUT 噪声可以通过一些额外的假设进行确定。由于器件噪声产生的 rms 相位误差一般极小,因此我们可以使用小角度近似值将输出载波的表达式改为:
相位检测器的输出已解调,因此可以称为“基带信号”。一旦确定相位检测器增益和输入信号功率,即可计算出实际的相位噪声(假设放大器产生的相位噪声可以忽略不计)。每个 DUT 固有的噪声是不相关的,所以它们产生的噪声是相同的,并且 rms 总和为测得的输出相位噪声。为此,我们从频谱分析仪测得的相位噪声(单位:dBc/Hz)中减去 3 dB 以确定每个 DUT 产生的噪声。这表示相对于信号功率的相位噪声功率:
当进行非常敏感的相位噪声测量时,放大器产生的噪声可能是显著的。放大器的残余相位噪声通过以下方法测量:从电路中拆除 DUT1 和 DUT2,然后对放大器直接应用功率分配器输出。放大器输入信号功率必须在幅度和压摆率方面与实际的 DUT 输出信号相似。使用上述步骤,通过从测得的 DUT 相位噪声中减去测得的放大器相位噪声,即可得到精确的 DUT 相位噪声。同样,关键是要确保放大器的增益和噪声指数彼此尽可能接近。
请注意,需要时钟输入信号的 DUT 将安装一个具有一定噪声的前端放大器。因此,由于放大器输入处的阈值不确定性,具有低压摆率的时钟源可能会无意中增加 DUT 产生的相位噪声。当使用正弦时钟源时,请使用最大允许的幅值来最大化压摆率。
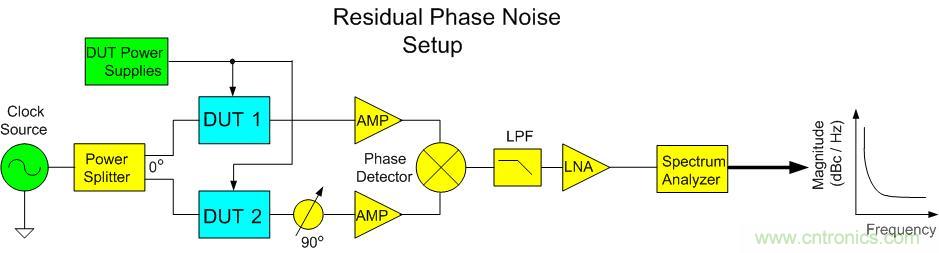
图 1. 残余相位噪声测量装置。
测试装置的基本细节
使用图 1 中所示的测试装置,两个具有相同零件号的 DUT 由单个 1 GHz 时钟源定时。器件被设置为将时钟频率除以四以产生 250 MHz 的输出。此外,两个输出信号进行相对的相位移动 90°(正交)以最小化出现在直流处的下转换信号电平。DUT 信号由低噪声放大器(LNA)放大,以增加测量系统的动态范围(放大器产生的相位噪声可以小到忽略不计)。放大器输出被发送到均衡混频器(相位检测器)。相位检测器将两个信号混合,在其输出处产生和积及差积。和积由低通滤波器滤除。剩余的差积构成下转换为直流(相位噪声)的 250 MHz 输出信号。LNA 提供足够的增益以克服频谱分析仪的本底噪声限制。
公用时钟源相位噪声的消除
图 2 显示了两个时钟源(具有极其不同的相位噪声特性)的绝对相位噪声测量。从理论上讲,任一时钟源均不会影响由残余相位噪声装置测得的 DUT 相加相位噪声。图 3 确认了这一理论。它绘制了两个单独的残余相位噪声测量,每个时钟源有一个轨迹曲线。两个轨迹曲线几乎重叠,证明了公用时钟源噪声已由残余相位噪声装置消除。在绝对相位噪声装置中,此噪声将不会消除。事实上,如果 DUT 是理想的(无相加相位噪声),则其绝对相位噪声曲线将与图 2 中的曲线相匹配(但由于四分之一 的频率转换,它会低 12 dB)。时钟源 2 在正常化至 250-MHz 载波后,展现出 –92 dBc/Hz 的相位噪声(1 kHz 偏置时),而测得的与时钟源 2 相关的 DUT 相位噪声为 –135 dBc/Hz(1 kHz 时)。因此,残余相位测量抑制了大约 40 dB 的输入时钟相位噪声。
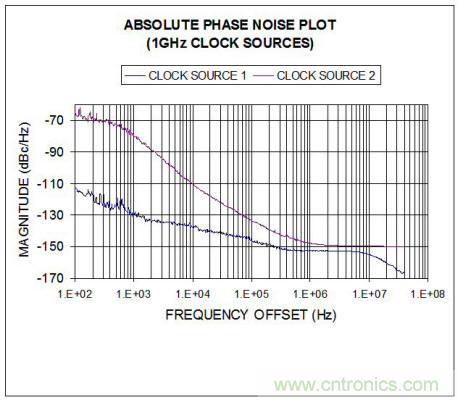
图 2. 两个不同时钟源的绝对相位噪声测量值。
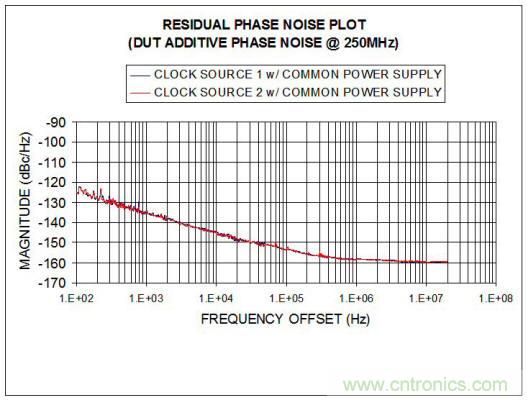
图 3. 时钟源几乎对残余相位噪声测量值无影响。
公用电源噪声的消除
图 3 中使用了与图 1 相同的公用电源连接。图 4 显示了为每个 DUT 使用单独噪声电源的影响。不相关的电源噪声会导致近载波相位噪声大幅增加。
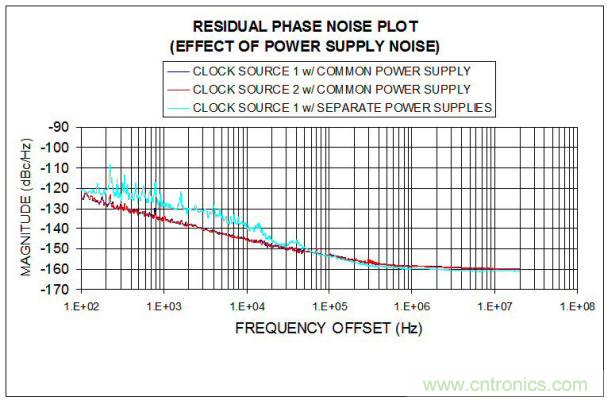
图 4. 残余相位噪声测量显示公用和单独电源的影响。
图 5 显示了使用低噪声电源时的绝对相位噪声测量。具有低噪声电源的绝对相位噪声与具有单独低噪声电源的残余相位噪声展现出了良好的一致性。已在残余相位噪声测量中消除了电源相位噪声,但在绝对相位噪声测量中并没有消除电源相位噪声。
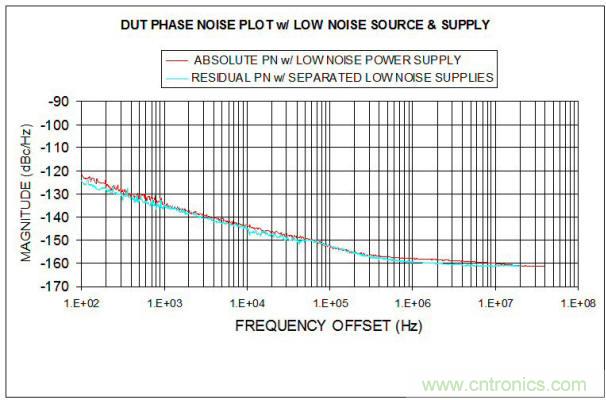
图 5. 近载波相位噪声因低噪声电源而得到了改善
残余相位噪声测量法是一个非常有用的技术,它用于识别作为系统设计一部分的单个元件所产生的相位噪声。使用这种方法,外部噪声源(例如输入时钟和电源)在每个 DUT 的输出处相关联,因此可以有效地消除。此外,它还可能说明 DUT 残余噪声测量中使用的缓冲器或放大器所产生的相位噪声,方法是对这些元件进行附加的残余相位噪声测量。组合使用残余和绝对相位噪声测量法是识别系统设计中主要噪声源的一个非常有效的方法。在分频器上获得的测量数据展示了残余相位噪声测量法的概念和效用,并且量化了噪声输入时钟和电源的影响。借助这一评估方法,系统设计师可以根据实际的测量数据得出输入时钟源和电源的规格。
推荐阅读:
基于IMU和地磁传感器的捷联惯性导航系统
安静且简单的Silent Switcher器件
∑-Δ型ADC时钟—不仅仅是抖动
带故障注入功能的高精度旋转变压器仿真系统
小尺寸高功率密度