可视化WIFI遥控搬运机器人之硬件部分设计
本设计主要研究基于WIFI网络的可视化无线遥控搬运机器人,利用WIFI网络高速传输实时视频图像采集,通过机器人安装的传感器实现数据采集。采用WIFI网络通讯使得控制端多样化,可用手机,电脑等具备WIFI功能的设备进行控制。
此外,还可将机器人接入Internet实现更远距离的控制。本设计在S3C6410平台上移植了Linux操作系统用于接收命令并对硬件设备进行控制,其中移植了MJPGstreamer作为视频服务器,移植了BOA服务器作为WEB服务器。本文将从硬件设计,驱动程序编写,服务器移植,服务程序编写,Android应用程序编写,Web应用程序编写等方面来讲述本设计的功能实现。随着科学技术的快速发展,机器人已经渐渐的步入人们的实际生活之中。本设计所研究的遥控搬运机器人只是众多机器人中的一种。搬运机器人主要代替人完成物体的夹取,运输,摆放工作。搬运机器人可工作于人类无法进入或对人体有害的工作环境。传统搬运机器人多采用无线电以及红外的方式来进行遥控,这种机器人操控范围较小,并且需要特定的控制器。本设计主要研究基于WIFI网络的无线遥控搬运机器人,利用WIFI网络高速传输可以实现实时视频图像采集,以及机器人上传感器数据采集。采用WIFI网络通讯使得控制端多样化,可用手机,电脑等具备WIFI功能的设备进行控制。此外,还可将机器人接入Internet来实现更远距离的控制。
1 总体设计
1.1 功能框图
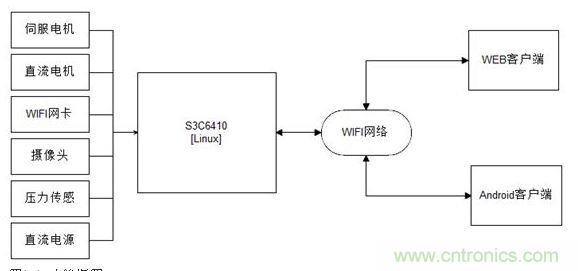
图1-1 功能框图
1.2 总体设计介绍
如图1-1所示,本设计服务器端采用移植了Linux操作系统的S3C6410,通过完成底层驱动的移植和编写实现对硬件的控制,其次移植了MJPGstreamer服务器和BOA服务器等实现图像数据,控制信息传输。客户端方面分别编写了WEB版和Android版应用程序。
2 硬件设计
2.1 硬件选型
2.1.1 MCU
本设计的主控器采用友善之臂公司所生产的一款核心板。其主芯片S3C6410是三星公司基于ARM1176JZF-S核设计的一款嵌入式处理器。该核心板配置了256M DDR RAM,并且主频为533MHz,最高主频可以达到667MHz。通过将Linux操作系统移植到该核心板上完成对硬件的管理与客户端提供数据交换,响应客户端的命令控制。
2.1.2 伺服电机
本设计所采用的伺服电机为微型伺服马达,也称作舵机。其主要应用于模型的动作控制。通过脉宽调制可以对其进行较精确的控制。本设计采用TOROBOT公司生产的TR213舵机。TR213全金属齿轮其动态扭矩可以达到13kg.cm,转角范围180°,控制精度达到0.5°,工作电压为4.8-7.2V。其性能能够满足本设计的基本的要求。所以选用两个两个TR213配合夹持器完成物体的夹持工作。
2.1.3 直流电机
直流电机用于控制机器人移动,本设计采用带齿轮箱的直流电机,其减速比为1:120,工作电压: 3V-12V左右,7.2V电压下转速达120转/分,4个直流电机配合车体,最大负载可达到2KG。
2.1.4 WIFI网卡
无线网卡采用USB接口的必联(B-LINK)BL-LW05-AR5无线网卡,其主芯片为RTL8188,并且外置了5DBI的高增益天线,传输速度快最高可达150Mbps,实际传输距离较远,并且支持AP模式。本设计通过移植该网卡的驱动,Hostapd以及DHCP让机器人作为AP热点供无线设备进行连接控制。
2.1.5 摄像头
摄像头采用中星微ZC301P,该摄像头采用USB接口,像素高达130W,拥有6mm的五玻镜头,62度视角,并且具有自动亮度、自动白平衡、伽玛校正功能。本设计中使用这款摄像头来完成机器人前方视频数据采集。
2.1.6 压力传感器
为了采集机器人夹持器的压力数据,本设计采用了FSR402薄膜压力传感器。该传感器受力后会导致电阻变小,根据其电阻值得变化可以得到压力的变化。其允许的压力范围为100g~10kg,并且传感器受力局域的直径达1.27cm。
2.1.7 直流电源
为了完成物体的夹持,搬运,摆放工作,本机器人带有4路直流电机,2路伺服电机,耗电量较大,且负载时电流较大。为了使其能稳定正常工作,本设计采用了一款15C的航模电池,其容量为1300mah,标称电压7.4V,充满电压8.4V,最大电流可达16A。配以LM338稳压器可以稳定的提供5A,5V直流电源。
2.2 硬件电路设计
2.2.1电源电路
2.2.1电源电路
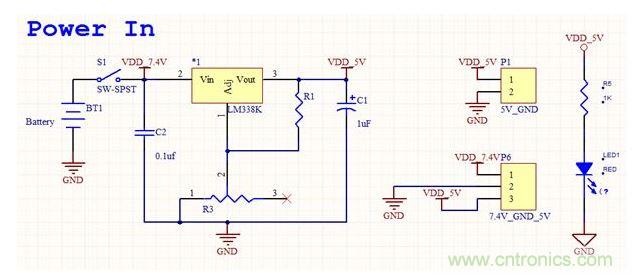
图2-1 电源电路电源部分采用可充电的锂电池进行供电,由于需要较大电流来驱动直流电机与伺服电机同时工作,所以采用了15C的航模电池并配以LM338进行稳压。图中R3为电位器,通过调节R3使得LM338输出端输出5V电压,用于驱动伺服电机和控制板。未经稳压的7.4V用于驱动4路直流电机。
2.2.2 电机驱动电路
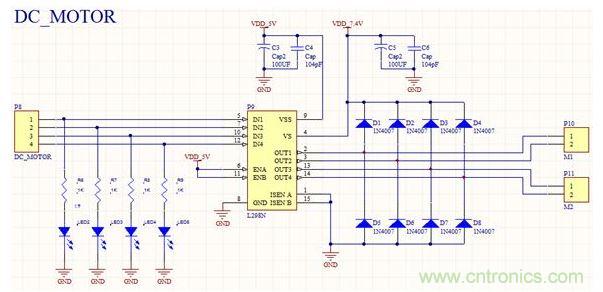
图2-12直流电机驱动电路上图为采用ST公司生产的L298N芯片来实现的直流电机驱动电路,该芯片是一种大电流、高电压的电机驱动芯片,其广泛应用于嵌入式系统中直流电机的控制。
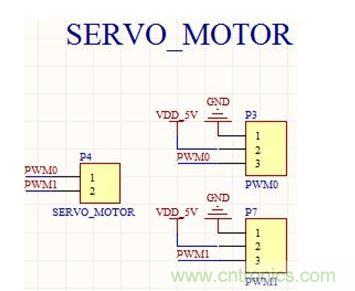
图2-3 伺服电机驱动电路上图为伺服电机驱动电路,该电路较为简单,只需要提供电源以及PWM输入端。
2.2.3 USB扩展电路
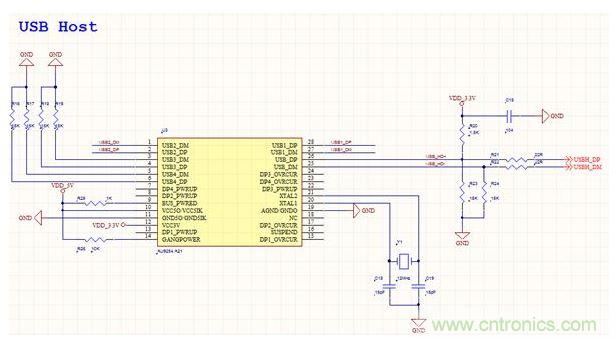
图2-4 USB扩展电路上图为USB扩展电路,由于S3C6410只带有1路USB HOST,而本设计需要2路USB口来连接USB摄像头和USB网卡,所以使用AU9254A21对USB口进行扩展。2.2.4 ADC采集电路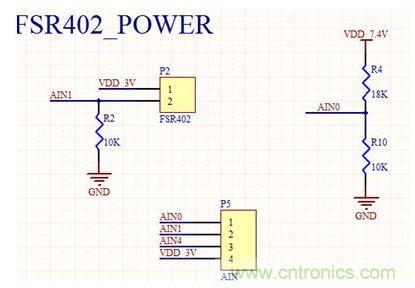
图2-5 ADC采集电路采用S3C6410自带的AD转换器采集压力传感器数据和电池电量数据。上图为本设计中ADC采集电路。