为振动马达应用设计驱动电路
中心论题:
- 振动马达有着广泛的应用,多数分为直流有刷或无刷电机,有扁平和圆柱两种基本的结构
- 介绍无刷直流扁平振动马达的基本构造
- A1442 BLDC马达驱动电路集成了主动制动、睡眠模式、防空转,反向电池保护等功能,是驱动马达唯一必须的的IC
解决方案:
- 利用数字换向与线性软开关避免电火花,从而避免宽带射频干扰(RFI)干扰
- 利用旁路电容降低在开关电源的电感负载时产生的瞬时电压峰值
- 利用A1442 BLDC马达驱动电路实现主动制动、睡眠模式、防空转,反向电池保护等功能
振动马达用于各种应用中,包括手机、游戏操纵杆、手持游戏机、寻呼机、牙刷及剔须刀等。最令人感兴趣的是手机市场,该市场的全球手机出货量在2007年已经超过10亿部。手机市场推动着微型振动马达设计与制造技术方面的创新。较小的手机要求马达占用较少的PCB面积,并需要马达采用较薄的设计。手机中还采用了进行来电显示振铃及游戏应用的马达。
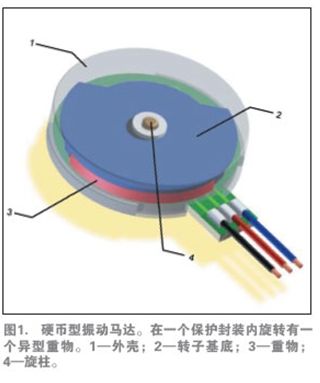
多数振动马达由一个较小的电动马达驱动一个偏心配重,如图1所示。马达分为直流有刷或无刷电机,有两种基本的结构:硬币状(扁平)与圆柱形(条状)。
柱型马达是采用传统轴向设计的简单有刷电机,如图2所示。用于多种应用中,但由于体积较大,不适合在手机中应用。柱型马达在手机中需要较大的空间,直径是所有振动马达中最大的。

在电刷切换马达线圈的电流时,所有的有刷电机在换向点会产生电火花。这些电火花是宽带射频干扰(RFI)的最佳发射源。电刷会发生磨损,这是马达故障的最主要原因。
更小、更薄的设计需求促成了将有刷电机技术用于扁平振动马达中,如图3所示。与电刷接触的换向点对转子中的电动线圈进行激励。激励线圈时会产生一个磁场,该磁场可与集成在定子中的环形磁铁作用,产生旋转。
如图3所示,换向点以交变的极性对排列,当转子运动时,线圈在通过换向点时不断地改变极性。马达如此以与所施加电压成正比例的速度持续地旋转。扁平振动马达中更复杂的电刷一般比柱形马达电刷的可靠性差一些。

无刷振动电机
如前所述,无刷电机具有较长的寿命,并由于产生的电火花较少,也没有了RFI干扰。无刷直流(BLDC)设计还提供业内直径最小、厚度最薄的扁平振动马达。图4介绍了这种马达的基本构造。
在这种设计中,转子组件中包含了磁铁和在旋转时产生振动的配重。较大的线圈移到了定子内,在定子中连接到控制IC。
数字换向与线性软开关避免了电火花,从而也避免了RFI干扰。Allegro完全集成的A1442霍尔效应传感器与精密放大器通过比较器电路连接到一个内部全桥输出电路,该比较器可确定适当的换向点。图4中马达的第三条线是可选的,它连接到A1442的启用针脚(enable pin),用作控制主动制动与睡眠功能。第三线可将IC针脚连接到PCB的VCC。

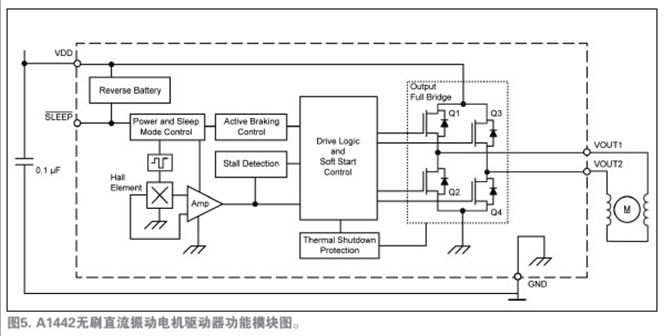
A1442是驱动马达唯一必须的的IC。图5所示的功能模块图说明了设备运行和先进的特性。注意图4和图5中,采用集成的霍尔传感器免除了外部霍尔传感器,从而减少了马达PCB元件数量。唯一所需的外部元件是一种标准电路特性——位于应用马达安装PCB上的0.1μF的旁路电容,它用于降低在开关电源的电感负载时产生的瞬时电压峰值。
软开关与换向
当设备加电时,它可检测到磁场并激活电桥。活动的晶体管根据磁极来设定。南极磁场激活输出晶体管Q1与Q4,驱动电流从VOUT1流行VOUT2。当北极磁场出现接近时(旋转),Q1与Q4关闭,而Q2和Q3导通。该驱动电流从VOUT2流向VOUT1,从而逆转了经过线圈的电流方向。
马达的设计会有所变化,但其最大的转速范围从9,000rpm到15,000rpm。多数的设计采用四极的转子磁铁,有些少数的设计采用六极磁铁。使用这些参数,使用下面的等式可轻松地计算出换向开关频率(fCS , Hz):
fCS = RPM × PP/60,
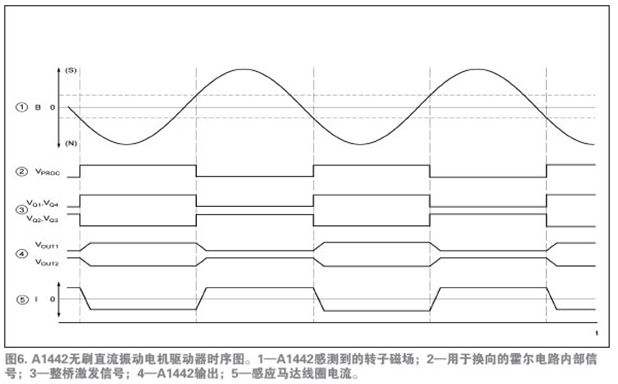
其中PP为磁极对的数量。对于转速为9,000rpm的四极磁铁,fCS为300Hz。对于转速为9,000rpm的四极磁铁,fCS为750Hz。因此,换向信号与线圈电流开关事件均在在音频范围内。软开关驱动算法为通过逐渐降低线圈中的电流然后反转其方向,可减少由开关感应马达线圈负载所产生的音频噪音及EMI。图6中的时序图说明了开关活动的过程。
主动制动、睡眠模式、防空转
A1442 BLDC马达驱动电路集成了主动制动功能,可用于快速停止或启动循环。当手机处于睡眠模式时,快速停止或启动循环在手机振铃、来电显示中十分有用,也用于游戏应用中。制动功能可用睡眠针脚激活,如图5所示。
在一个低信号施加到睡眠针脚时,马达会启动主动制动功能:反转输出桥的极性,从而反转电流方向。反转电流方向而使磁场反转的效果,是为了施加一个以反方向旋转马达的力,这样可迅速地降低其速度。制动后,马达驱动电路关闭活动电路IC,而进入睡眠模式。
在睡眠模式下,IC的电流消耗通常小于1μA。睡眠模式可免除客户PCB上的FET晶体管,不然必须要有这种晶体管来关闭或开启马达的电源。这样,电机就可永久地连接到电池上。
如果电机停止,驱动电路会发起一个防空转算法。当电机出现停止时,输出会不断地开启与关闭来重启马达。开关循环生成力矩循环来抖动电机以增加启动的机会。它还预防能损坏马达线圈的连续停止电流。
A1442中集成了反向电池保护功能,以防止马达线错误地反焊到PCB上,这样也便于重新加工。如果设备关闭时线圈的输出意外地短路,马达驱动电路的热关闭保护功能会在IC预热时禁用输出。反向电池保与热关闭对组装车间及在OEM电路板装配线上返工是非常强大的功能。
随着超薄设计的出现,振动马达的厚度成为一个重要的卖点。现在马达厚度接近1.5mm甚至更薄,利用EW封装–MLP(DFN)的最大总封装高度0.4mm,长度与宽度仅为1.5mm×2mm,可实现更大的设计灵活性。